Sim, é isso mesmo! Graças ao meu amigo Gui Constantino e ao time de Mindstorms EV3 Experts, fomos convidados para participar da maior exposição de LEGO nos Emirados Árabes. Estou extremamente ansioso e poderei mostrar pela primeira vez todos os módulos que desenvolvi para a Monster Fabrik já divulgada tantas vezes por aqui. Após vários […]
Ler Mais
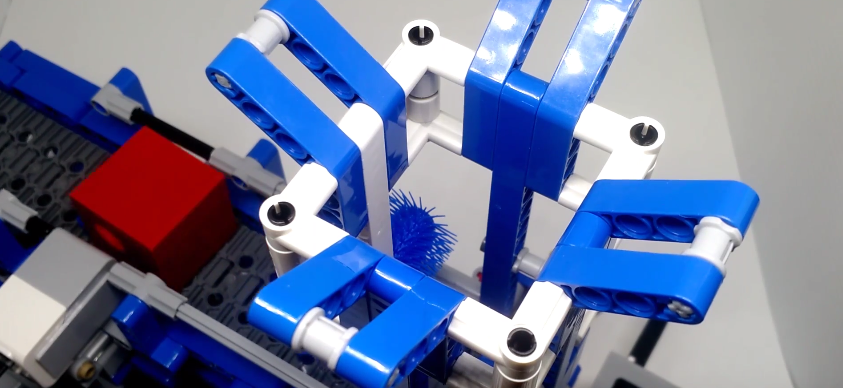
O Filler belt é uma esteira que possui um funil para recebimento dos blocos. Por ser um projeto muito simples que servirá apenas para receber blocos pelo funil superior e transferí-lo até a próxima máquina, não há muito o que se falar sobre sua estrutura, porém, é na programação que o seu desafio se inicia. Se […]
Ler Mais
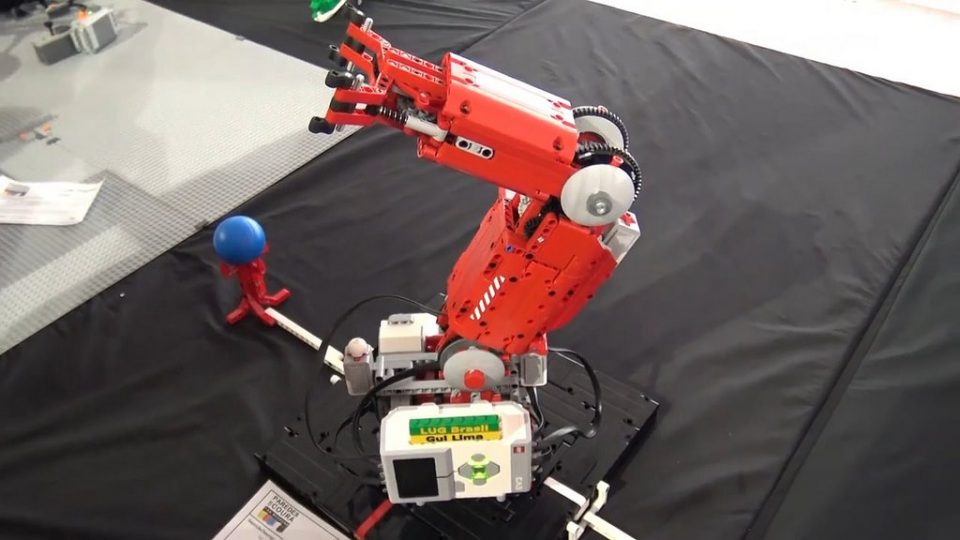
Olá pessoal! Estou muito feliz pois meu braço mecânico (Monst3rArm) foi apresentado em um dos maiores canais para fãs de LEGO no Youtube. Apesar de um pequeno erro no meu nome (que já está em processo de correção) fiquei muito feliz por ter tido a oportunidade de me apresentar à um público muito maior que […]
Ler Mais
Olá galerinha, bão demais? Bem o projeto continua de vento em popa e começando a ganhar cada vez mais espaço, corpo e cores. Digo cores porque sim, gosto de diferenciar meus projetos por cores para garantir que a pessoa que está apenas conhecendo entenda que são feitos em módulos separados. Uma coisa muito importante desse […]
Ler Mais
Aprender a trabalhar em conjunto para conquistar algo grandioso para todos é algo que sempre procuro nas minhas atividades. Por isso mesmo, propus ao time de construtores Mindstorms/Technic da LUG Brasil que pudéssemos apresentar ao público algo novo e nunca exposto até então nas terras tupiniquins. Sempre tive a vontade de representar alguns dos momentos […]
Ler Mais
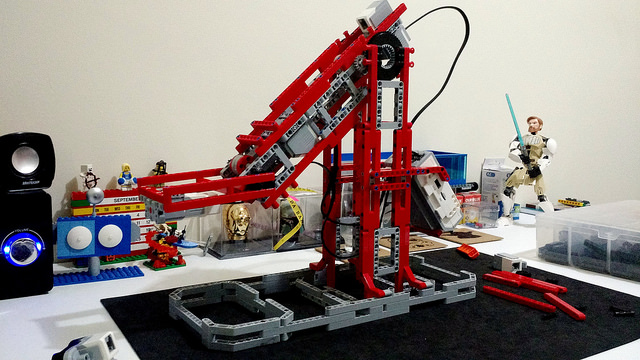
Como sabem, gosto muito de representar objetos industriais que na minha opinião são o ápice da robótica que conheço. Sei que todos os outros tipos são interessantes também, mas no momento estamos (equipe Mindstorms LUGBrasil) trabalhando pra construir uma fábrica de verdade toda baseada em LEGO. Por esse mesmo motivo estou há meses trabalhando em […]
Ler Mais
Há dois anos atrás a equipe da LUGBrasil se aventurou em mais um desafio onde seria possível controlar um Zeppelin durante a “Expo AnimeFriends 2014“. Para que esse desafio aéreo fosse conquistado, várias discussões sobre os formatos, tipos e necessidades para que pudéssemos ter toda a dirigibilidade e funcionalidade necessária para manobramos esse monstro em […]
Ler Mais
Gui Lima e Lee Magpili Após o evento do Campeonato FLL 2015/1016 – Regional Bahia, fomos convidados para participar do evento em Brasília representando o time AprendaRobótica. Ficamos super orgulhosos e ainda mais felizes quando soubemos que seríamos convidados especiais. Algumas das novidades é que teríamos uma área para divulgar dicas (construção, programação, core values […]
Ler Mais
Olá pessoal, pra quem já está acompanhando meu instagram, youtube e snapchat sabem que estou lutando pra construir um braço mecânico industrial. A ideia não é nova, mas é um desafio pessoal que pode ser facilmente concluído. Bem, facilmente é um ponto complicado de ser alcançado, mas possível é sim! Alguns pontos que preciso evoluir […]
Ler Mais
É complicado viver nesse hiato entre o fim de uma temporada regional e o campeonato nacional da FLL uma vez que se participa deles. Esse período de reavaliação de estratégias, desafios, realinhamento de atividades e tarefas são necessários para que possamos nos preparar para uma das mais difíceis, mas não impossíveis fases do campeonato. Sei que […]
Ler Mais