Braço Mecânico Industrial – Parte 2

Gui Lima e Lee Magpili
Após o evento do Campeonato FLL 2015/1016 – Regional Bahia, fomos convidados para participar do evento em Brasília representando o time AprendaRobótica. Ficamos super orgulhosos e ainda mais felizes quando soubemos que seríamos convidados especiais. Algumas das novidades é que teríamos uma área para divulgar dicas (construção, programação, core values e pesquisa), minicursos, palestras e exposição de robôs. Sim! uma mini-expo só pra gente!

Um dos momentos mais marcantes foi quando o Lee Magpili, um dos desenvolvedores do EV3 na LEGO foi nos visitar e conhecer as construções. Fiquei super feliz de poder mostrar pra ele a minha construção e tirar essa fotinho acima ai! Valeu LEE! *_*
Voltando agora a falar sobre a minha criação, ela estava até então 100% funcional e possuía uma base fixa, um motor para girar toda a estrutura em 360º, o braço em 180º, o antebraço em 180º e uma garra para manipular objetos.
Visão do robô
Um dos problemas dessa versão era o seu peso, apesar de possuir algumas partes bem trabalhadas, ao chegar em alguns ângulos o motor acabava forçando a construção, o braço ficava bambo e o esforço do motor passava a ser muito grande. A base também era muito alta e isso dificultava a manipulação de objetos próximos a ele. Beleza e estética nem sempre são favoráveis. :/
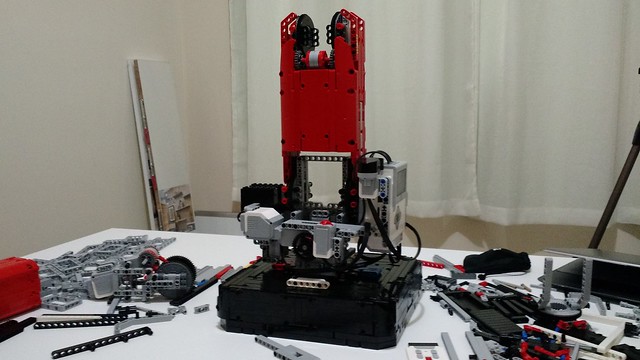
Depois de vários testes, consegui criar uma base que era mais leve, fina e robusta (lado esquerdo da foto abaixo) utilizando vários jogos de engrenagens para dar a força, velocidade e precisão que precisava para mover os objetos próximos ao robô. Único problema até então era que o motor que girava a base, e o que girava o braço eram grandes, as engrenagens estavam expostas ou entravam em contato com outras partes. Momento de frustração total. Nessas horas, me lembrei dos conceitos de design thinking e comecei a fazer dois protótipos separados (dividir os problemas) e comecei a tentar uni-los com mais calma.

Versão 5 e versão 4 respectivamente
No próximo post, apresentarei como consegui finalizar o meu robô e algumas fotos em detalhes de como ele funciona de verdade. Aguardem!