Braço Mecânico Industrial – Parte 2
Olá pessoal!
Estou muito feliz pois meu braço mecânico (Monst3rArm) foi apresentado em um dos maiores canais para fãs de LEGO no Youtube. Apesar de um pequeno erro no meu nome (que já está em processo de correção) fiquei muito feliz por ter tido a oportunidade de me apresentar à um público muito maior que do meu próprio canal. Mas como não estou aqui pra falar de mim e sim sobre as minhas construções, está na hora de terminar o assunto sobre como o braço foi desenvolvido.
Como já foi discutido, existiam algumas premissas para que o braço fosse construído:
- Deveria utilizar apenas um EV3
- Deveria ser forte e estável em seus movimentos
- Deveria utilizar a programação LEGO Mindstorms
Dessa forma, vários testes e protótipos foram construídos até chegar no produto final que possui:1- EV3
- 2- Motores G – para movimentação da Base e Braço
- 2- Motores Medium – para movimentação do Antebraço e Garra
- 3- Sensores de toque para indicar fim-de-curso do Braço e Antebraço
- 1- Sensor de cor para identificar os pontos cardiais da Base.
Para poder exemplificar melhor sobre todas as suas funcionalidades, falarei separadamente sobre cada módulo do Monst3rArm.
Base
A Base foi construída com dimensões exatas e de forma quadrada, para que ele tivesse uma proporção correta independente de onde começasse seu movimento. Sendo assim, foram construídos alguns pontos cardinais para que o sensor de cor identificasse sua posição inicial. Outro ponto importante é que toda a estrutura do braço mecânico deveria ter uma facilidade para se movimentar, e para tal, são utilizados apenas dois pinos para segurá-lo. 😀

Fundo da base e sustentação central

Base – parte superior com os pontos cardinais coloridos
Detalhe do ponto de suporte da base com a base do robô

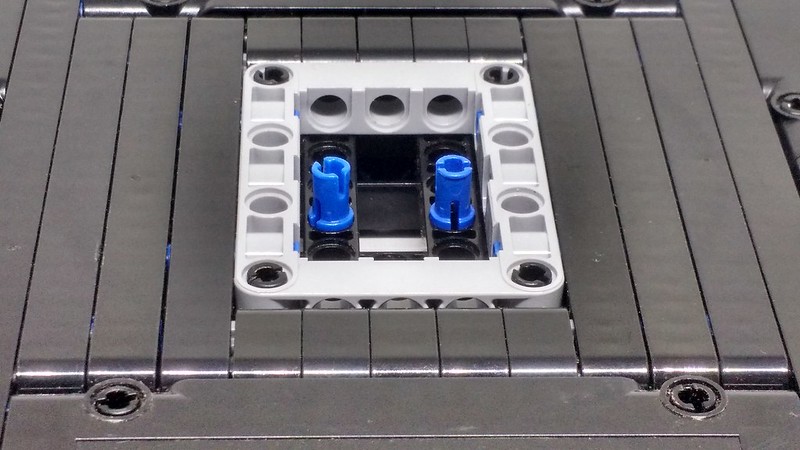
Base do robô e detalhe das estruturas
Essa última foto mostra em detalhe como que as estruturas do motor usam as cruzetas para movimentar a turntable central e garantir um movimento mais macio e estável. Além de mostrar no meio da turntable os dois conectores onde os pinos serão presos e conseguirão suportar toda a estrutura do braço. É possível identificar do lado esquerdo da foto um sensor de cor/luz, ele é utilizado para identificar as cores dos pontos cardinais da base fixa, sendo elas Azul, Vermelho, Amarelo e Branco. Uma curiosidade, a cor verde até foi utilizada, porém dependendo a iluminação do local ela identificava como azul, confundindo todo o robô e a execução do mesmo. Por essa razão, a cor vermelha foi adicionada na base.
Braço
Para movimentação do braço pensei em fazer com que ele tivesse um grande alcance sem que comprometesse sua estrutura ou o centro de massa. Para isso, fiz uma construção usando sensores de toque para o reconhecer o fim-de-curso. Toda vez que ele acionasse o sensor de toque o braço parava pois “sabia” que era o seu limite físico. Para garantir que a estrutura fosse forte o suficiente e não desabasse toda vez que uma programação fosse finalizada, usei a engrenagem sem-fim para girar as turntables que controlam o movimento do braço.

Sensores de toque Vermelho e Branco para indicar o fim-de-curso
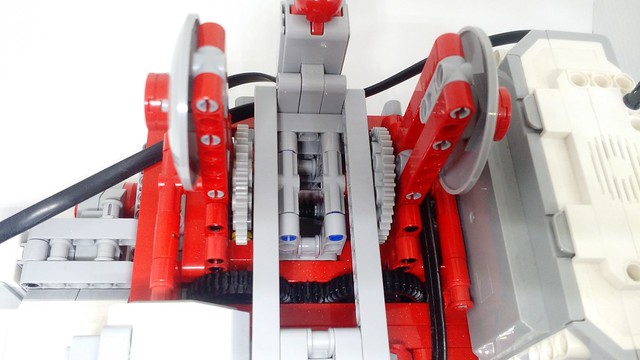
Detalhe das engrenagens que controlam o movimento do Braço
Antebraço
Para o antebraço usei o mesmo princípio onde precisava ter estabilidade e força no movimento. A construção possui engrenagens sem-fim com um conjunto de engrenagens com acesso direto à turntable. Como possui apenas um sensor de toque para configuração inicial é preciso que ele se movimente até o sensor e à partir daí “saiba” o tanto que pode se movimentar até seu limite físico.
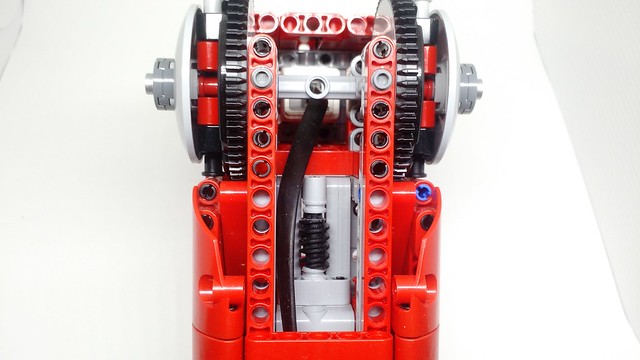
Detalhe da construção do motor responsável pelo movimento

Sistema de engrenagens (coberto)

Sistema de engrenagens (aberto)
Garra
Para a garra decidi fazer uma construção baseado em algumas coisas que já vi pela internet e um toque de construção pessoal. Ela possui dois amortecedores para suportar a força do motor contra o objeto que está sendo agarrado assim como independente do tamanho do objeto, a mola ajudará a pegar o objeto e não forçar o motor internamente. Como não é utilizado nenhum sensor na garra, a leitura do giro do motor garante que ele saiba que já chegou ao seu limite físico.
Vídeo
Para completar e finalizar sobre o assunto desse braço, segue abaixo o vídeo que comentei bem no início em que tive a oportunidade de levá-lo para a Exposição de Paredes de Coura em Portugal que falarei ainda por aqui. Espero que gostem!
Quase!! hahaha