Uma vez por ano a LEGO seleciona os maiores divulgadores, construtores, desenvolvedores e artistas no LEGO MINDSTORMS e os convida à participar de uma comunidade conhecida como MCP (MINDSTORMS Community Partner). Esses 50 especialistas são convidados à participar de várias conversas e desafios para conseguir envolver ainda mais as comunidades locais e compartilhar suas ideias, […]
Ler Mais
O ano de 2016 foi cheio de atividades, construções eventos e muitos encontros interessantes. Não somente para mim que tive a oportunidade de conhecer vários lugares e pessoas bacanas, mas para toda a comunidade Mindstorms. Por isso mesmo, Baz chegou a criar esse excelente material mostrando o ano de 2016 e o envolvimento de todos […]
Ler Mais
Após os resultados das classificações para FLL Nacional fui convidado pela técnica Djéssica Gradisse para conhecer e orientar os alunos do SESI/SENAI de Betim. Esse encontro que aconteceu no último dia 4 foi de muita valia tanto para eles quanto para mim pois o aprendizado mútuo foi muito importante. O foco principal da equipe era […]
Ler Mais
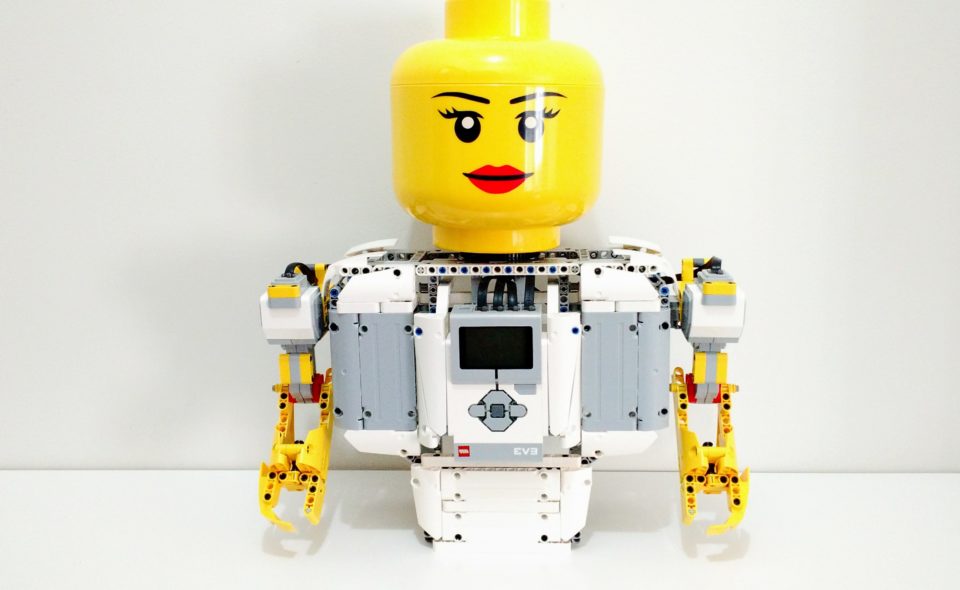
Como parte do meu projeto mensal, quis criar um verdadeiro IronMan. OK, ele não vai sair por aí salvando famílias nos confins do mundo contra terroristas nem salvando o planeta por portais interdimensionais (ou será que sim?), mas poderá se movimentar utilizando da biomimética humana. Calma aí, biomimética humana? Me explica isso aí Gui porque […]
Ler Mais
Eu realmente me divirto criando coisas diferentes por aí, e por isso, tive a ideia de criar a Brushing Teeth Machine no ano passado. Cheguei a ganhar um prêmio da Comunidade LEGO oficial no facebook pela criatividade. Bacana né? Nessa primeira versão ela conseguiria escovar os dentes de forma simples mas funcional, ou seja, valeu o […]
Ler Mais
Na escola em que trabalho (Robotica Dhel) à cada fim de semestre comemoramos o fim do cliclo apresentando aos pais e amigos o que foi desenvolvido em sala de aula. Nesse dia de comemoração, todos são convidados a trocar experiências apresentando o que aprenderam e como conseguiram transpor os desafios propostos. Cada aluno possui uma […]
Ler Mais
Olá Pessoal! Prontos para mais um ano de construções? Eu estou muito empolgado e por isso estou propondo construir pelo menos um MOC original por mês. Isso mesmo, pelo menos uma construção muito louca usando power functions ou mindstorms para me manter ativo na comunidade. E vocês, o que estão inventando por aí? O melhor […]
Ler Mais
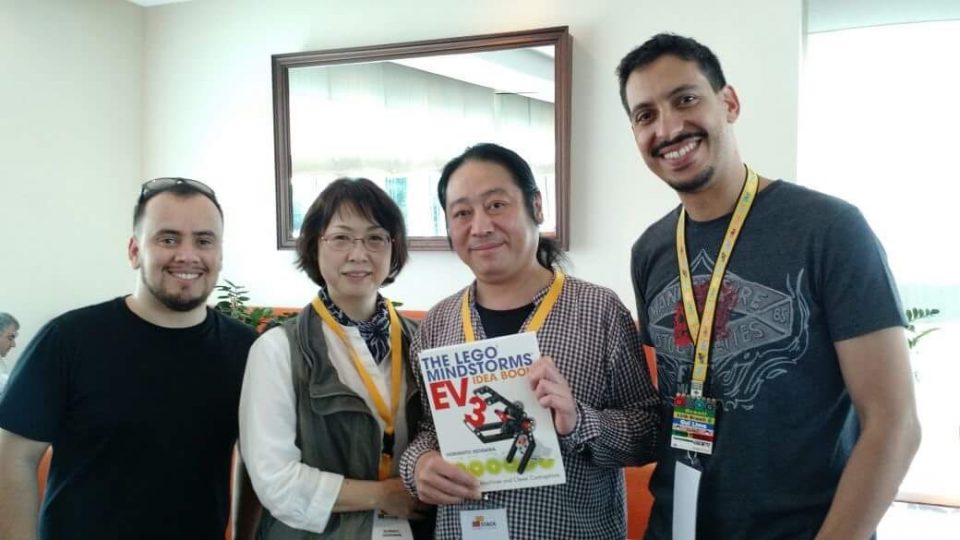
Olá pessoal, estou bem atrasado pra divulgar sobre os eventos que participei e atualizar toda a história por aqui, mas como não gosto de desculpas, vamos trabalhar né? Segue abaixo uma lista de vídeos que mostram exatamente como foram os dias que passamos viajando para a exposição do STACKIT Events – em Dubai/Emirados Árabes. O […]
Ler Mais
Sim, é isso mesmo! Graças ao meu amigo Gui Constantino e ao time de Mindstorms EV3 Experts, fomos convidados para participar da maior exposição de LEGO nos Emirados Árabes. Estou extremamente ansioso e poderei mostrar pela primeira vez todos os módulos que desenvolvi para a Monster Fabrik já divulgada tantas vezes por aqui. Após vários […]
Ler Mais
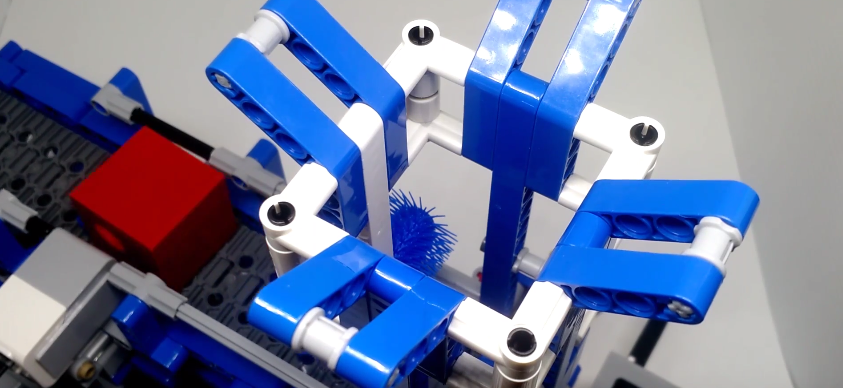
O Filler belt é uma esteira que possui um funil para recebimento dos blocos. Por ser um projeto muito simples que servirá apenas para receber blocos pelo funil superior e transferí-lo até a próxima máquina, não há muito o que se falar sobre sua estrutura, porém, é na programação que o seu desafio se inicia. Se […]
Ler Mais