DELTA ARM – Parte 3
Olá pessoal,
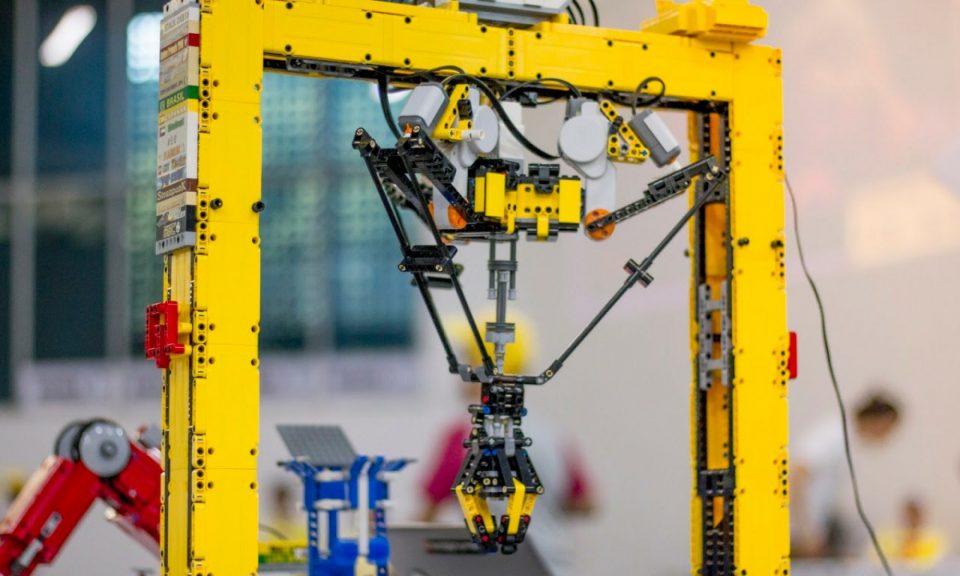
Sei que estava devendo apresentar um pouco das funcionalidades do braço, então deixarei aqui o processo de criação, evolução e finalização do Delta. Essa superestrutura é capaz de movimentar os três motores simultaneamente a fim de alcançarem os pontos programados. O melhor de tudo é que eles podem ser acionados enquanto a garra abre ou fecha durante o seu percurso.

Durante o processo de criação, cheguei a publicar os posts 1 e 2 sobre essa construção, se ainda não viu, vale um click!
Hoje farei aqui um histórico sobre o que foi planejado e como foi alcançado esse resultado. Primeiramente precisamos então separar tudo o que foi desenvolvido, para isso, falarei aqui sobre a base, o braço, a garra e o eixo telescópico.
BASE
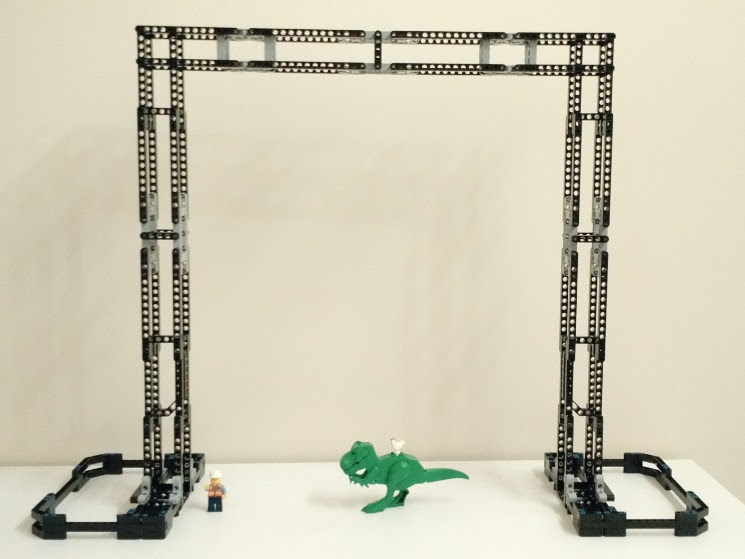
A base foi construída de forma simples e isométrica, para que o peso de toda sua estrutura mais o objeto que fosse pego pudessem se deslocar de forma mais estável possível. Quando construo não gosto de estruturas que balançam demais ou que não se suportam sozinhas.
Antes: Estrutura simples porém robusta, composta por suporte central e duas colunas verticais com pés largos para aumentar o ponto de equilíbrio.
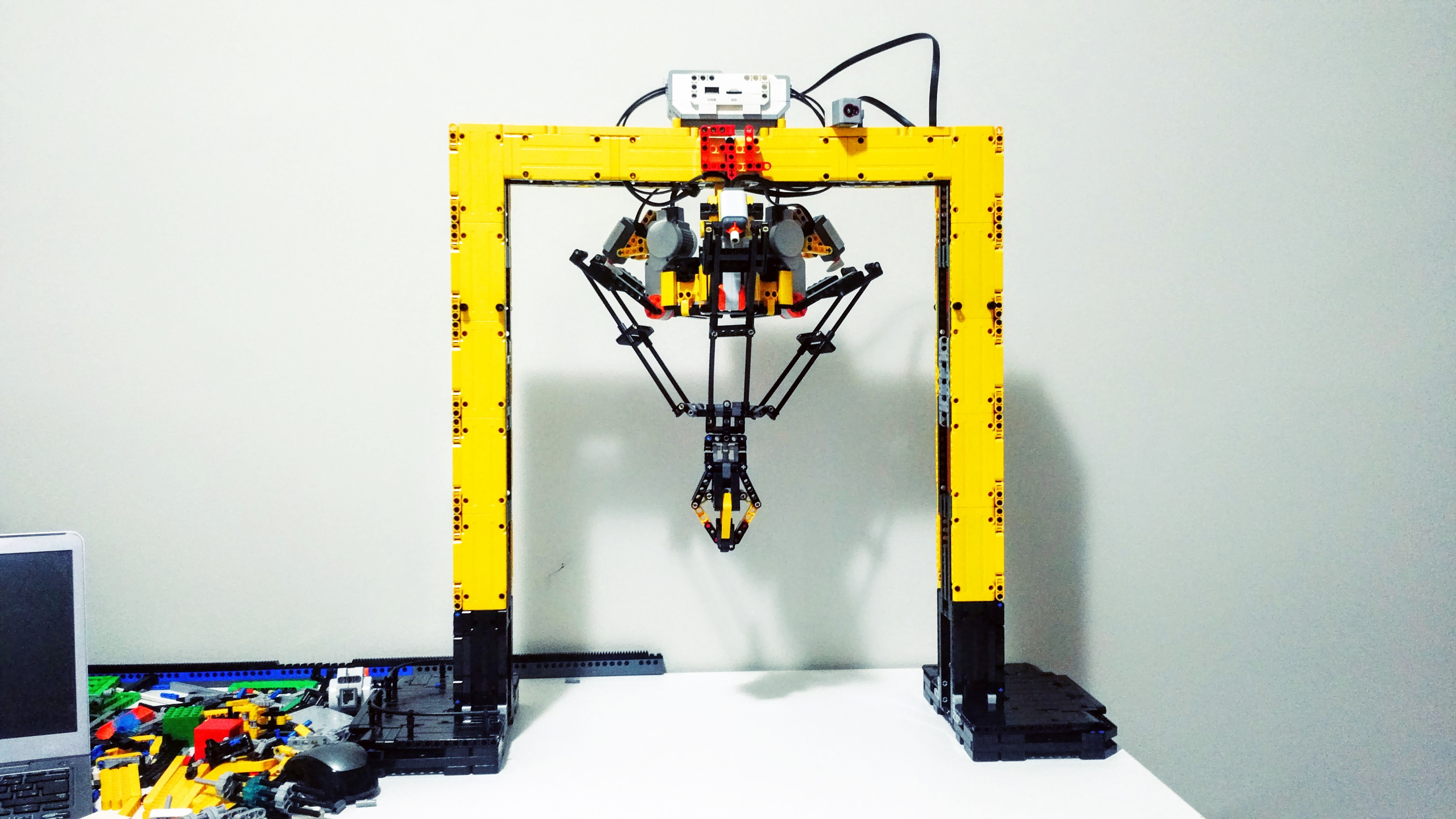
Depois: Estrutura reforçada com painéis coloridos que aumentam o suporte para as estruturas internas, passagem de cabos por canaletas internas. Foram mantidos o suporte central e as duas colunas verticais. Cada coluna recebeu mais um painel de altura para suportar a estrutura. Pés receberam cobertura para compor melhor a criação.
BRAÇOS
Os braços foram criados em formato de Y, sendo assim, os três motores estão equidistantes entre si. Nessa fase foram verificados dois pontos muito importantes, o peso e seu intertravamento. A estrutura em si foi feita de forma a suportar o máximo de peso possível para garantir que as peças não se soltem ou que os braços trepidassem.
Antes: Estrutura física para suportar os motores era fraca, poderia se abrir facilmente se um tipo de movimento fosse utilizado. As estruturas dos braços eram grandes e seu alcance não era eficaz. O uso do motor central para garra ainda não havia sido implementado.
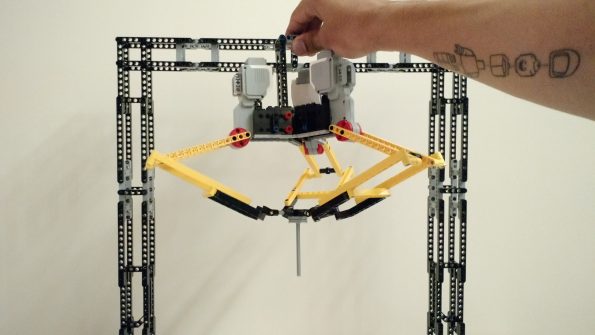

Depois: Estrutura física para suportar os motores foi refeita e reforçada para suportar qualquer tipo de movimento dos motores. Sensores de toque foram adicionados no final para criar um “fim de curso” para os braços. As estruturas dos braços foram refeitas para ficarem o mais leve e eficazes possível. O uso do motor central para garra foi implementado.


E aí, o que acharam, gostaram dessa criação? Deixem seus comentários!