Agora, todas as minhas dicas de construção, criação e evolução serão disponibilizadas em um só lugar. O canal do youtube Make Awesome Creations foi criado para divulgar tudo isso e um pouquinho mais. No programa piloto abordei sobre “5 dicas para que seu robô ande em linha reta” enquanto no segundo foi feito para ensinar […]
Ler Mais
Durante a semana do dia 02/11 foi realizada aqui na capital das Minas Gerais vários eventos de tecnologia na FINIT. Durante esse encontro de tecnologias e eventos, tivemos a Campus Party MG, a Feira de tecnologia e a Mini Maker Faire onde tive o prazer de participar e divulgar um pouquinho do que gostamos tanto […]
Ler Mais
Tive a felicidade de poder construir algo que pudesse ser utilizado no meu casamento, essa construção em si, foi baseada na série BrickHeadz que foi inserida no último ano e já possui vários exemplos. Na série é possível ver desde personagens da Disney, Marvel e do filme da própria LEGO. Aproveitei algumas peças de vários […]
Ler Mais
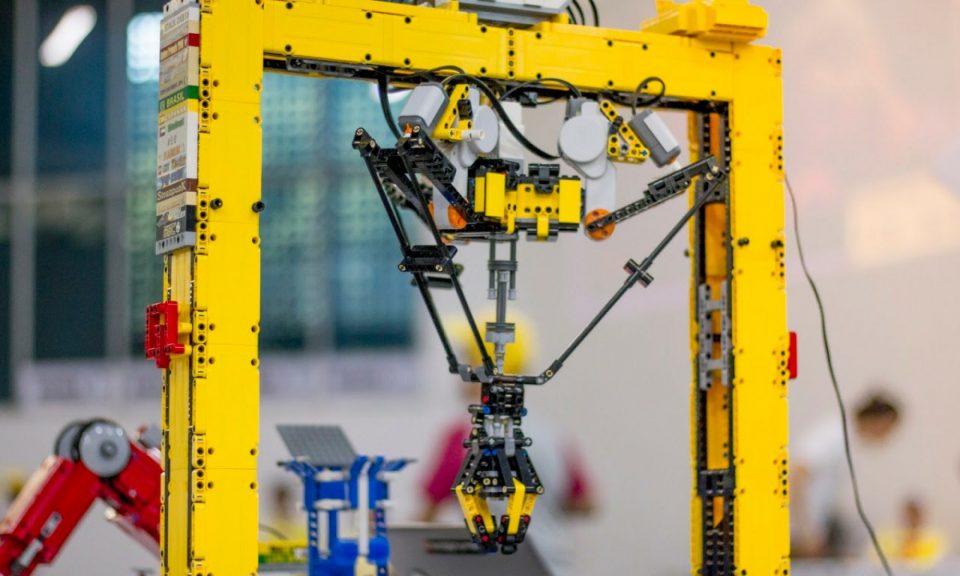
Olá pessoal, Sei que estava devendo apresentar um pouco das funcionalidades do braço, então deixarei aqui o processo de criação, evolução e finalização do Delta. Essa superestrutura é capaz de movimentar os três motores simultaneamente a fim de alcançarem os pontos programados. O melhor de tudo é que eles podem ser acionados enquanto a garra […]
Ler Mais
Durante a Finit, a Mini Maker Faire vai desenvolver o espírito empreendedor de jovens e adultos. Inscrições para os trabalhos vão até 8 de setembro Pela primeira vez em Minas Gerais, a Belo Horizonte Mini Maker Faire será realizada durante a FINIT, no Expominas. O evento, que viaja o mundo, terá exibição de invenções de todo […]
Ler Mais
Hoje começa mais uma aventura pro outro lado do mundo, na verdade, no Oriente Médio na maior exposição de LEGO por lá organizada pela StackIt. No último ano a exposição foi um sucesso e esse ano tivemos a oportunidade de sermos convidados novamente para mais um evento gigante. Bahrain é um pequeno país insular do […]
Ler Mais
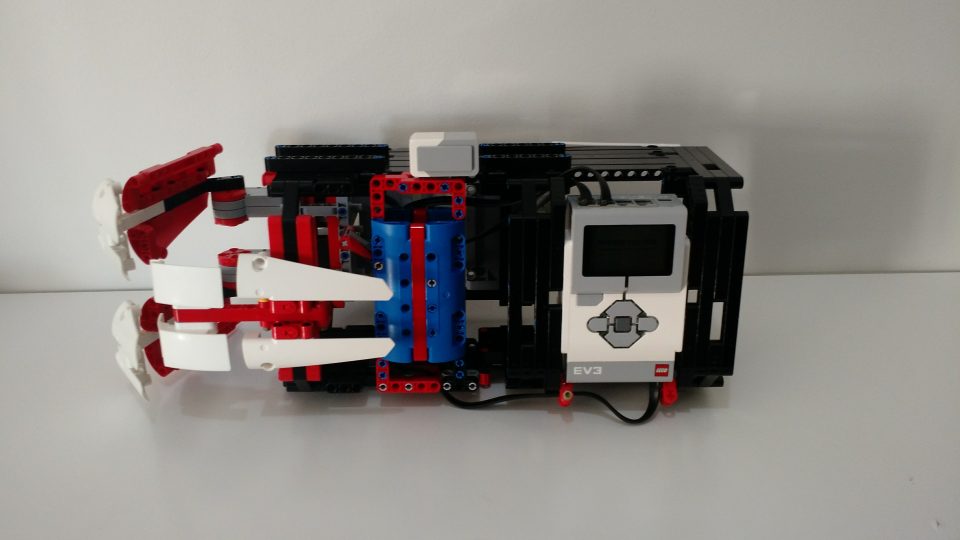
Olá galerinha do mal! Nesse último protótipo, construí uma luva que poderia lançar objetos, agarrar coisas e seria uma ótima brincadeira entre as crianças. Porém, devido umas correrias pra próxima expo, tive que desmontar e construir outros projetos. Pra não ficar sem algum tipo de documentação, siga abaixo o vídeo do funcionamento dessa criação!
Ler Mais
Já que temos um novo projeto de exposição que será em breve revelado, novos projetos devem ser apresentados também para impressionar adultos e crianças. Baseando nesse preceito, me perguntei o que fizemos de diferente que chamou a atenção dos pequenos e acabou assustando um pouco os adultos também? Um dos projetos que mais gostei de […]
Ler Mais
Durante o último fim de semana estive com o time TecnoRED em Brusque/SC onde fui convidado para ajudar a avaliar e preparar a equipe para representar o Brasil no Mundial de Robótica na Dinamarca durante a temporada FLL Animal Allies. O fundamento de todo esse trabalho era, reavaliar a equipe e saber se com todas […]
Ler Mais
DESAFIO TRUCK TRIAL Olá camaradas, este é O verdadeiro desafio, aqui não tem cilada Bino! Preparem seus caminhões para participar do desafio mais louco que vocês já participaram. Nada de ficar com construções paradas e expostas o dia todo, é aqui que separaremos os homens dos meninos! Quem tem o melhor controle sobre sua criação? […]
Ler Mais